Examples 5 -- Body Equilibrium¶
Contents:
from numpy import *
dtr = pi/180 # degree-to-radian conversion
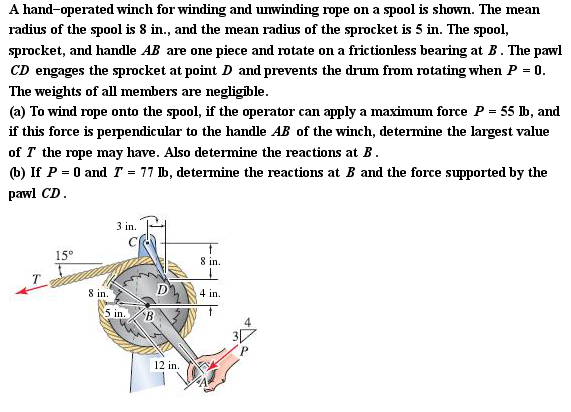
R_spool = 8.0 # in
R_sproc = 5.0 # in
CDx,CDy = 3.0,6.0 # in
BDx = CDx
BDy = 4.0 # in
l_BA = 13. # in
Pdirx,Pdiry = -4.,-3.
T_angle = 15*dtr # radians below -x
# part a
P_max = 50.0 # lb
# part b
T_b = 80.0 # lb
For part a, we balance two moments whose forces are already perpendicular to the radial direction:
$$T_{max} R_{spool} = P_{max} L_{BA}$$For part b, moment sum in $z$-direction gives
$$ T R_{spool} = |( R_{sproc} \hat{u}_{BD}) \times (F_{CD} \hat{u}_{CD})| $$so
$$ F_{CD} = \frac{ T R_{spool}}{ R_{sproc} \left |\hat{u}_{BD} \times \hat{u}_{CD} \right |} $$# part a
T_max = P_max*l_BA/R_spool
P = P_max * array((Pdirx,Pdiry)) / sqrt(Pdirx**2+Pdiry**2)
T = T_max * array((-cos(T_angle),-sin(T_angle)))
Bx = -P[0] - T[0]
By = -P[1] - T[1]
print ('part a')
print (' T =',T_max,'lb')
print (' Bx=',Bx,'lb')
print (' By=',By,'lb')
# part b
T = T_b * array((-cos(T_angle),-sin(T_angle)))
uCD = array((CDx,-CDy)) / sqrt(CDx**2+CDy**2)
uBD = array((BDx, BDy)) / sqrt(BDx**2+BDy**2)
FCD_mag = T_b * R_spool / ( R_sproc*abs(cross(uBD,uCD)))
FCD = FCD_mag * uCD
Bx = -FCD[0] - T[0]
By = -FCD[1] - T[1]
print ('part b')
print (' FCD=',-FCD_mag,'lb')
print (' Bx=',Bx,'lb')
print (' By=',By,'lb')
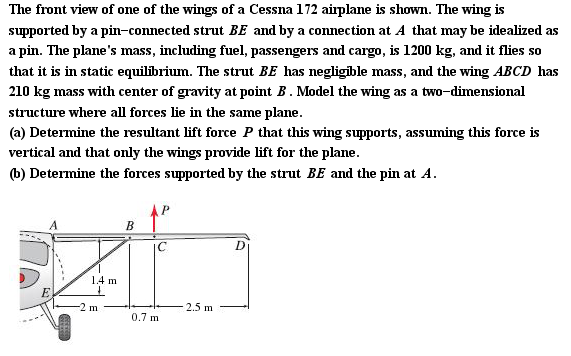
M = 1150. # kg
M_wing = 240. # kg
AEy = 1.4 # m
ABx = 3.0 # m
BCx = 0.8 # m
CDx = 2.5 # m
g = 9.81 # N/kg
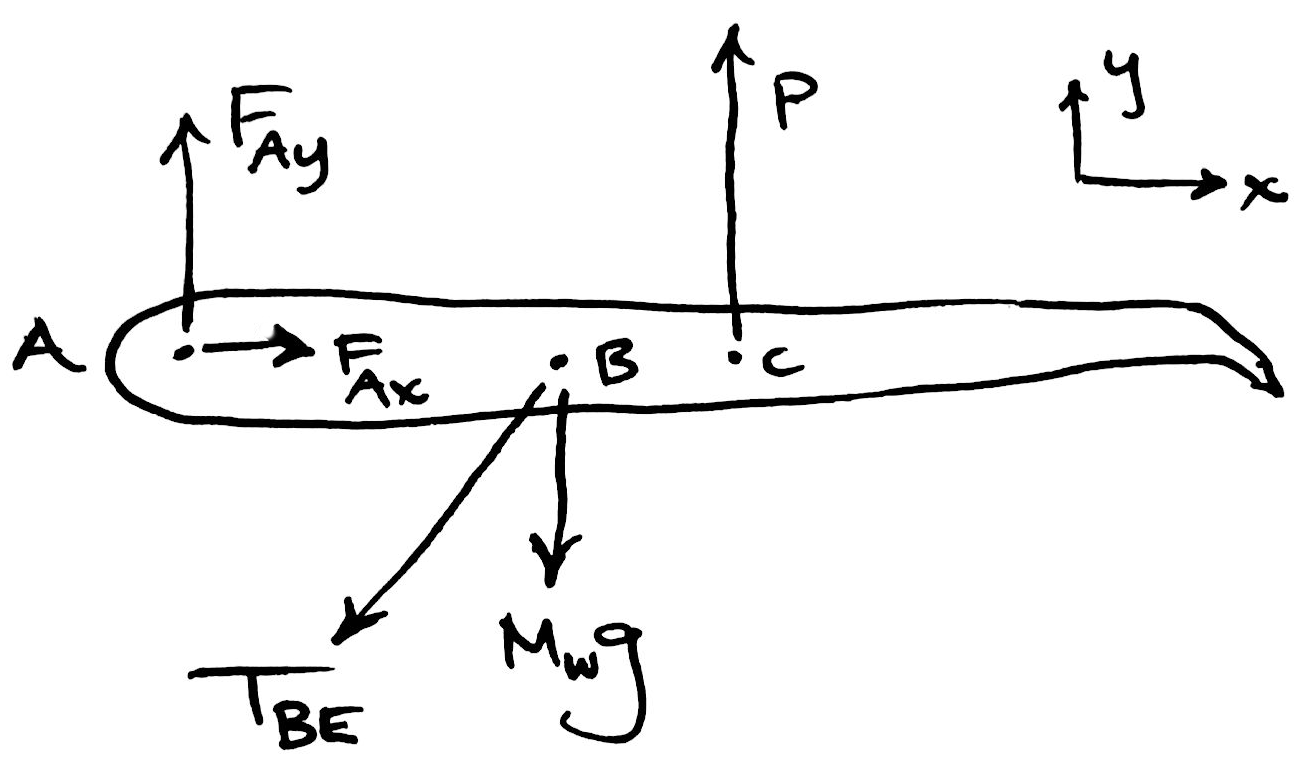
For part b, consider the free-body diagram and sum moments about point A:
$$ - \left | \vec{r}_{AB} \right | M_{wing}g - \left |\vec{r}_{AB} \times \left (T_{BE} \hat{u}_{BE} \right ) \right | + \left | \vec{r}_{AC} \right | P = 0 $$So
$$ T_{BE} = \frac{\left | \vec{r}_{AC} \right | P- \left | \vec{r}_{AB} \right | M_{wing}g}{\left |\vec{r}_{AB} \hat{\imath} \times \hat{u}_{BE} \right |} $$$$T_{BE} = \frac{\left | \vec{r}_{AC} \right | P- \left | \vec{r}_{AB} \right | M_{wing}g}{\left |\vec{r}_{AB} \right | \frac{\left |\vec{r}_{AE}\right |}{\left |\vec{r}_{BE} \right |} } $$$$T_{BE} = \left (\frac{\left |\vec{r}_{AC}\right |}{\left |\vec{r}_{AB} \right |} P- M_{wing}g \right ) \frac{\left |\vec{r}_{BE}\right |}{\left |\vec{r}_{AE} \right |}$$# part a
P = 0.5 * M*g
print ('part a')
print (' P=',P,'N')
# part b
TBE_tension = ( (ABx+BCx)/ABx * P - M_wing*g ) * sqrt(ABx**2+AEy**2)/AEy
uBE = array((-ABx,-AEy))/sqrt(ABx**2+AEy**2)
TBE = TBE_tension * uBE
FAx = -TBE[0]
FAy = -TBE[1] + M_wing*g - P
print ('part b')
print (' TBE=',TBE_tension,'N')
print (' Ax=',FAx,'N')
print (' Ay=',FAy,'N')
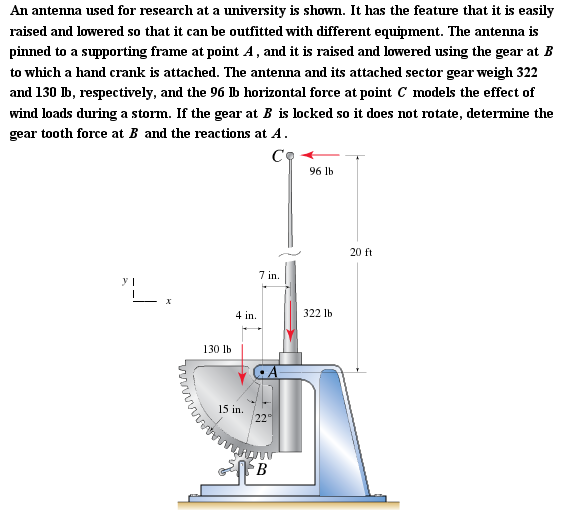
Wa, Wg = 327., 123. # lb
F_load = 92. # lb
Y = 29.*12 # in
X1,X2 = 5.,6. # in
R = 20. # in (gear radius)
Q = 16*dtr # radians
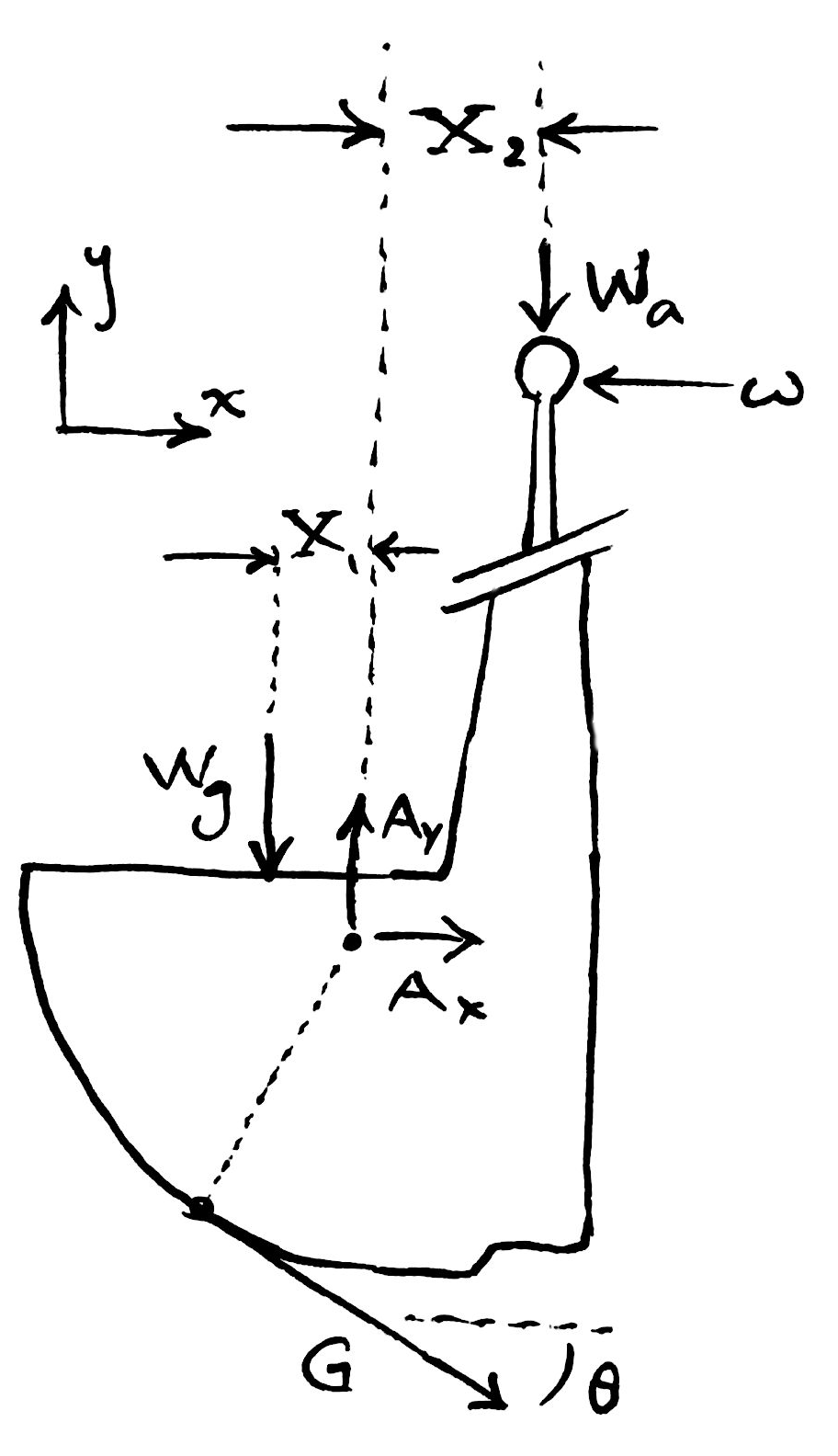
Define positive $G$ to be in lower-right direction (because of arrow in answer box).
$$\sum F_x = A_x + G \cos \theta - w = 0$$$$\sum F_y = -W_a - W_g + A_y - G \sin \theta = 0$$$$\sum M_A = R G + X_1 W_g - X_2 W_a + Yw = 0$$Solving moment equation for $G$, then force sums for $A_x$ and $A_y$:
w = F_load
G = -(X1*Wg - X2*Wa + Y*w)/R
Ax = w - G*cos(Q)
Ay = Wa + Wg + G*sin(Q)
print ('answer:')
print (' G =',G,'lb')
print (' Ay=',Ay,'lb')
print (' Ax=',Ax,'lb')
checked; works.
Note the direction for $G$ in the answer box defines the positive direction for that answer.
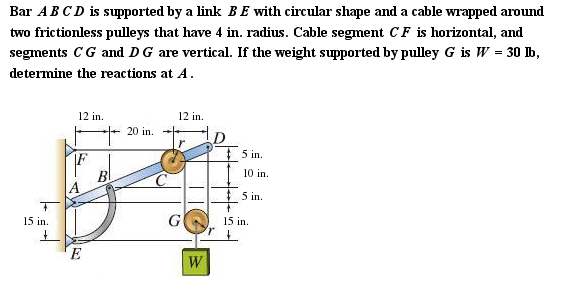
R = 4. # in (pulley radii)
W = 40. # lb
X1,X2,X3 = 12.,26.,12. # in (left to right)
Y1,Y2,Y3,Y4 = 17.,5.,10.,5. # in (bottom to top)
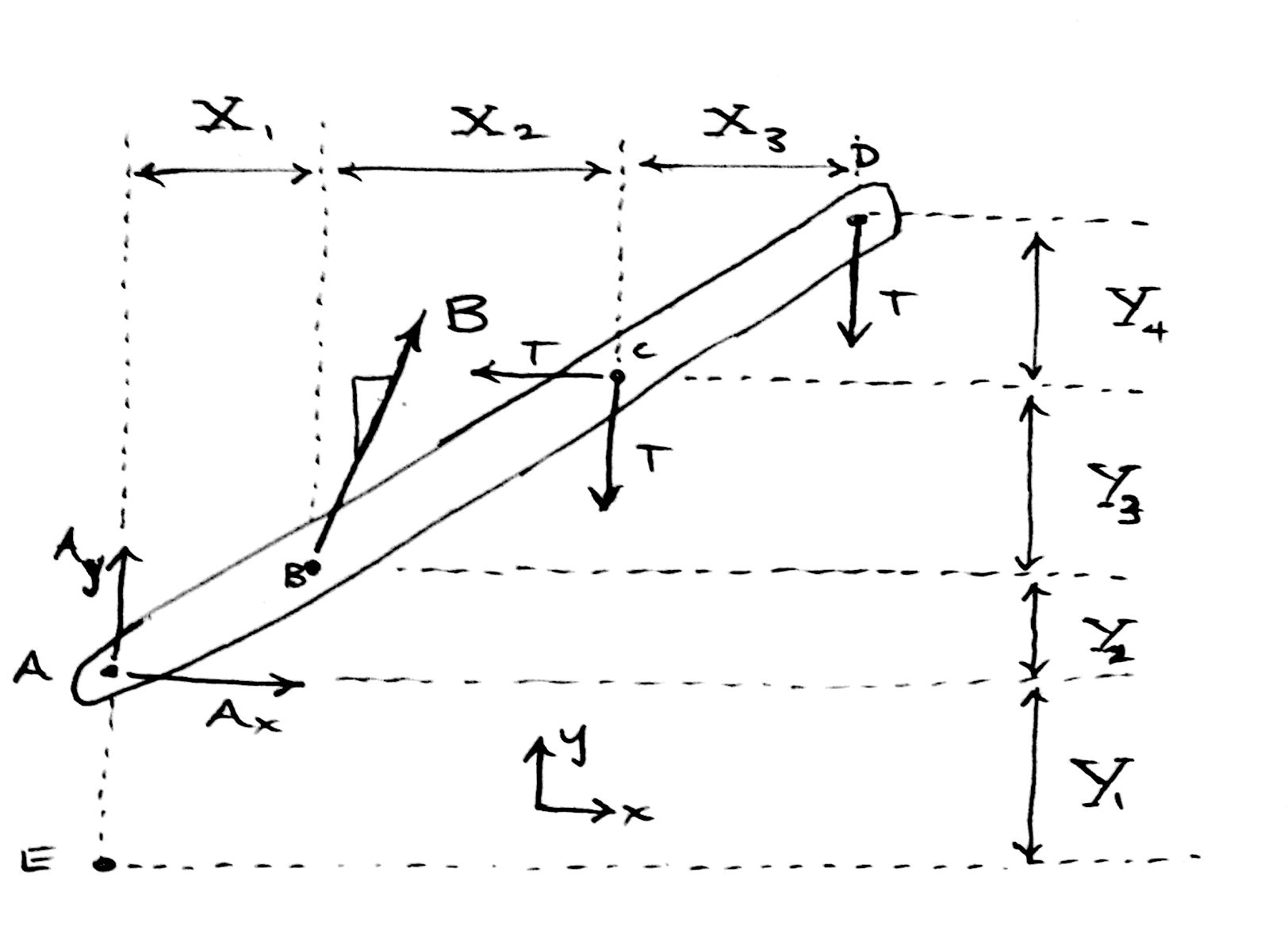
First note that $T=W/2$. Also, we may shift forces to pulley bearings as you can verify with an FBD of the pulley at C.
Sum of moments about $A$:
$$\sum M_A = B_y X_1 -B_X Y_2 +T(Y_2+Y_3)-T(X_1+X_2)-T(X_1+X_2+X_3)=0$$where $B_x = \frac{X_1}{Z}B$ and $B_y = \frac{Y_1+Y_2}{Z}B$ where $Z = \sqrt{X_1^2+(Y_1+Y_2)^2}$.
Solve for $B$:
$$B = T(2X_1+2X_2+X_3-Y_2-Y_3)\frac{Z}{X_1Y_1} $$T=W/2
Z = sqrt(X1**2+(Y1+Y2)**2)
B = T*( 2*X1 + 2*X2 + X3 - Y2 - Y3) * Z/(X1*Y1)
# force sum:
Ax = T - B*X1/Z
Ay = 2*T - B*(Y1+Y2)/Z
print ('answer:')
print (' Ax=',Ax,'lb')
print (' Ay=',Ay,'lb')
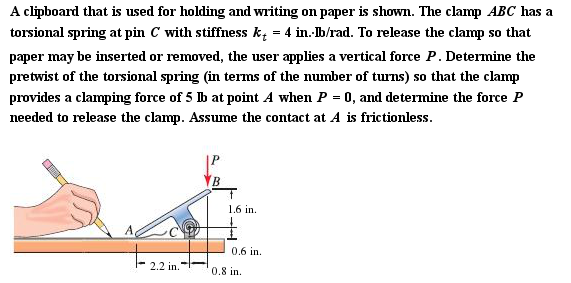
kt = 3.0 # in.lb/rad
X1,X2 = 2.1,0.8 # in (left to right)
Ay = 4.0 # lb
# vertical distances not required
Moment sum about C when $P=0$:
$$\sum M_C = k_t \theta - X_1 Ay = 0$$Moment sum about C when $A_y=0$:
$$\sum M_C = k_t \theta - X_2 P = 0$$Q = X1*Ay/kt
Q_turns = Q/(2*pi)
P = kt*Q/X2
print ('answer:')
print (' P=',P,'lb')
print (' Q=',Q_turns,'turns')
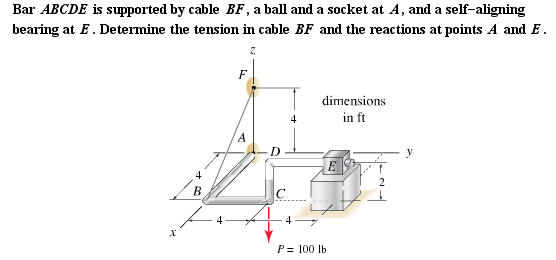
X = 4.0 # ft
Y1,Y2 = 4.,4. # ft
ZE,ZF = 2.,4. # ft
F = 102. # lb
Force sum:
$\sum \vec{F} = \vec{A} + T_{BF} (-\tfrac{1}{\sqrt{2}}\hat{\imath}+\tfrac{1}{\sqrt{2}}\hat{k}) -F\hat{k} +(E_x\hat{\imath}+E_z\hat{k})=0$
x-direction: $A_x - T_{BF} \tfrac{1}{\sqrt{2}} + E_x=0$
y-direction: $A_y =0$
z-direction: $A_z + T_{BF} \tfrac{1}{\sqrt{2}} -F +E_z=0$
Moment sum about A:
$\sum \vec{M}_A = XT_{BF}\tfrac{1}{\sqrt{2}}(-\hat{\jmath}) + (X\hat{\imath}+Y_1\hat{\jmath})\times(-F\hat{k})+(X\hat{\imath}+(Y_1+Y_2)\hat{\jmath}+Z_E\hat{k})\times(E_x\hat{\imath}+E_z\hat{k})=0$
$\sum \vec{M}_A = -\frac{XT_{BF}}{\sqrt{2}}\hat{\jmath} + XF\hat{\jmath} - Y_1F\hat{\imath}+(Y_1+Y_2)E_z\hat{\imath}+ (Z_EE_x-XE_z) \hat{\jmath} - (Y_1+Y_2)E_x\hat{k}=0 $
x-direction: $-Y_1F+(Y_1+Y_2)E_z =0$
y-direction: $-\frac{XT_{BF}}{\sqrt{2}} + XF +Z_EE_x-XE_z =0$
z-direction: $-(Y_1+Y_2)E_x=0$
So $A_y=0$ and $E_x=0$ and $E_z=\frac{Y_1F}{Y_1+Y_2}$.
Then $T_{BF}=-(XE_z-XF)\sqrt{2}/X$.
And $A_x = T_{BF} \tfrac{1}{\sqrt{2}}$.
And $A_z = -T_{BF} \tfrac{1}{\sqrt{2}} +F -E_z$.
Ay=Ex=0.
Ez = Y1*F/(Y1+Y2)
TBF = -(X*Ez-X*F)*sqrt(2)/X
Ax = TBF/sqrt(2)
Az = -TBF/sqrt(2)+F-Ez
print ('answer:')
print (' Ax=',Ax,'lb')
print (' Ay=',Ay,'lb')
print (' Az=',Az,'lb')
print (' TBF=',TBF,'lb')
print (' Ex=',Ex,'lb')
print (' Ez=',Ez,'lb')
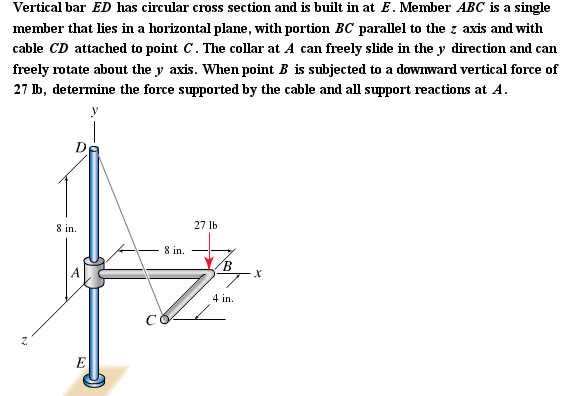
F = 27. # lb
X,Y,Z = 8.,8.,4. # in.
Force sum:
$\sum \vec{F} = A_x \hat{\imath}+A_z\hat{k}-F\hat{\jmath}+T_{CD}\hat{u}_{CD}=0$
x-direction: $A_x -\tfrac{X}{\alpha}T_{CD}=0$
y-direction: $-F +\tfrac{Y}{\alpha}T_{CD}=0$
z-direction: $A_z -\tfrac{Z}{\alpha}T_{CD}=0$
Let $\alpha = \sqrt{X^2+Y^2+Z^2}$.
Moment sum about A:
$\sum \vec{M}_A = M_{Ax}\hat{\imath} +M_{Az}\hat{k} -XF\hat{k}+T_{CD}\vec{r}_{AC}\times\hat{u}_{CD}=0$
$\sum \vec{M}_A = M_{Ax}\hat{\imath} +M_{Az}\hat{k} -XF\hat{k}+\frac{T_{CD}}{\alpha}\left ( -ZY\hat{\imath}+XY\hat{k} \right ) =0$
x-direction: $M_{Ax} -ZY\frac{T_{CD}}{\alpha} =0$
y-direction: (no equation)
z-direction: $M_{Az} -XF+\frac{T_{CD}}{\alpha} XY =0$
The force sum in the y direction yields $T_{CD}$, then the rest of the equations are just in terms of $T_{CD}$.
alpha = sqrt(X**2+Y**2+Z**2)
TCD = alpha*F/Y
Ax = TCD*X/alpha
Az = TCD*Z/alpha
MAx = Z*Y*TCD/alpha
MAz = X*F - X*Y*TCD/alpha
print ('answer:')
print (' TCD=',TCD,'lb')
print (' Ax=',Ax,'lb')
print (' Az=',Az,'lb')
print (' MAx=',MAx,'in.lb')
print (' MAz=',MAz,'in.lb')
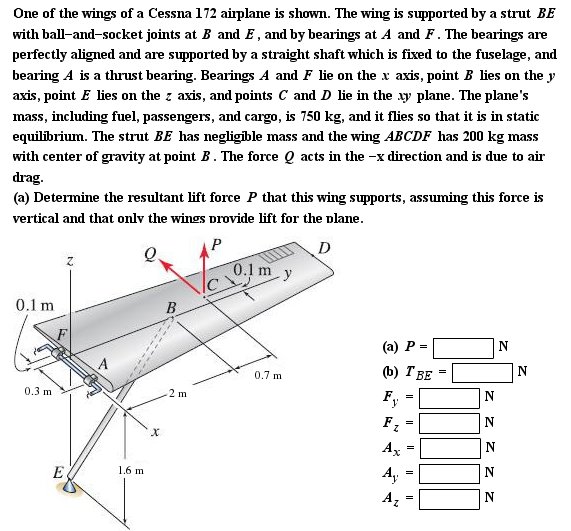
M = 800. # kg
Mwing = 170. # kg
XA,XF = 0.3,0.1 # m
YB,YBC = 2.2,0.7 # m
ZE = 1.3 # m
f = 0.1 # fraction of P that is Q
Let $\alpha=\sqrt{Y_B^2+Z_E^2}$.
Force sum:
x-direction: $A_x-Q=0$
y-direction: $A_y+F_y-T_{BE}\frac{Y_B}{\alpha}=0$
z-direction: $A_z+F_z-T_{BE}\frac{Z_E}{\alpha}+P-M_wg=0 $
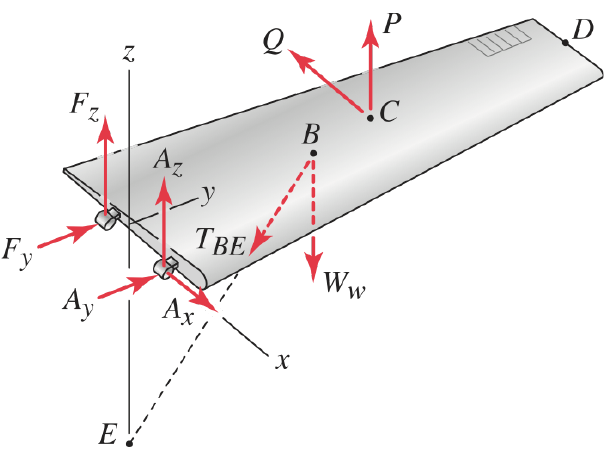
Moment sum about F:
$\sum \vec{M}_F = -(X_A+X_F)A_z\hat{\jmath}+(X_A+X_F)A_y\hat{k}+(X_F\hat{\imath}+Y_B\hat{\jmath}) \times \left [-T_{BE}\frac{Y_B}{\alpha}\hat{\jmath}+\left (-T_{BE}\frac{Z_E}{\alpha}-M_wg \right )\hat{k} \right ]+Y_CQ\hat{k}+Y_CP\hat{\imath}=0$
$\sum \vec{M}_F = -(X_A+X_F)A_z\hat{\jmath}+(X_A+X_F)A_y\hat{k}+\left [Y_B\left (-\frac{T_{BE}Z_E}{\alpha}-M_wg \right )\hat{\imath}-X_F\left (-\frac{T_{BE}Z_E}{\alpha}-M_wg \right )\hat{\jmath}-\frac{T_{BE}X_FY_B}{\alpha}\hat{k} \right ]+Y_CQ\hat{k}+Y_CP\hat{\imath}=0$
x-direction: $Y_B\left (-\frac{T_{BE}Z_E}{\alpha} -M_wg\right )+Y_CP=0$
y-direction: $-(X_A+X_F)A_z-X_F\left (-\frac{T_{BE}Z_E}{\alpha}-M_wg\right )=0$
z-direction: $(X_A+X_F)A_y-\frac{T_{BE}}{\alpha}X_FY_B+Y_CQ=0$
# part a
g = 9.81 # N/kg
P = 0.5*M*g
# part b
Q = f*P
Ax = Q
alpha = sqrt(YB**2+ZE**2)
YC = YB+YBC
TBE = -(-YC*P/YB+Mwing*g)*alpha/ZE
tmp = XF*(-TBE*ZE/alpha - Mwing*g)
Az = -tmp/(XA+XF)
Ay = -(-TBE*XF*YB/alpha+YC*Q)/(XA+XF)
Fy = TBE*YB/alpha - Ay
Fz = Mwing*g - P - Az + TBE*ZE/alpha
print ('answer:')
print (' P=',P,'N')
print (' TBE=',TBE,'N')
print (' Fy=',Fy,'N')
print (' Fz=',Fz,'N')
print (' Ax=',Ax,'N')
print (' Ay=',Ay,'N')
print (' Az=',Az,'N')