Examples 3 -- Particle Equilibrium¶
Contents:
from numpy import *
dtr = pi/180 # factor for degree-to-radian conversion
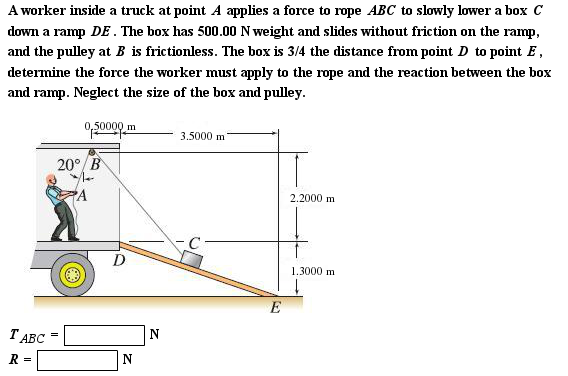
x1,x2 = 0.8,3.9 # m; left-to-right
y1,y2 = 1.6,2.1 # m; bottom, top
W = 260.0 # N
f = 3./4 # fraction of distance from D to E
rBD = array(( x1, -y2 )) # m
rBE = array(( x1+x2, -y1-y2 )) # m
rED = rBD - rBE
rEC = (1-f)*rED
rBC = rBE + rEC
uCB = -rBC / sqrt(sum(rBC**2))
# find unit vector perp. to ramp (and upward)
uED = rED / sqrt(sum(rED**2))
uperp = array((uED[1],-uED[0]))
print ('verify that we have uperp correct:')
print (' uperp=',uperp)
print (' uperp.uED=',dot(uperp,uED))
print (' mag of uperp=',sqrt(sum(uperp**2)))
arctan(uCB[1]/uCB[0])*180/pi
Force balancing gives
$$\sum \vec{F}_i = T_{ABC} \hat{u}_{CB} - W\hat{\jmath} + R \hat{u}_{perp} =0$$Now we have two equations and two unknowns $T_{ABC}$ and $R$.
import sympy as s
# define symbolic variables:
Ts,Rs = s.symbols('Ts,Rs')
# construct the equation that equals zero:
eq = Ts*uCB - W*array((0.,1)) + Rs*uperp
print (eq)
ss = s.solve( [eq[0],eq[1]], [Ts,Rs])
print (ss)
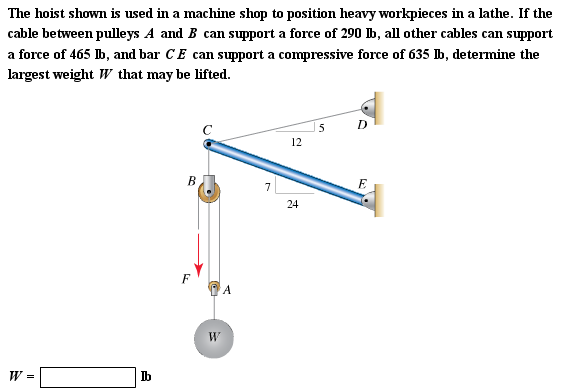
T_AB_lim = 270. # lb
T_other_lim = 495. # lb
F_EC_lim = 650. # lb
uCD = array(( 12., 5)) / sqrt(12**2+5**2)
uEC = array((-24., 7)) / sqrt(24**2+7**2)
Need to solve two equations with two unknowns:
$$-(W+F)\hat{\jmath} + F_{EC} \hat{u}_{EC} + T_{CD} \hat{u}_{CD} =0$$Where $F=\tfrac{1}{2}W$. The $x$ components yield
$$F_{EC} = - T_{CD} \frac{u_{CDx}}{ u_{ECx}}$$And the $y$ components yield
$$F_{EC} = \frac{-T_{CD} u_{CDy} + \tfrac{3}{2}W}{ u_{ECy}}$$Then
$$-T_{CD} \frac{ u_{CDx} }{ u_{ECx}} u_{ECy} = -T_{CD} u_{CDy} +\tfrac{3}{2}W$$So
$$T_{CD} = \frac{ \tfrac{3}{2}W }{ u_{CDy} - \frac{ u_{CDx} }{ u_{ECx}} u_{ECy} }$$This along with the $x$ component equation give both unknowns.
W = arange(100.,1e3,1)
T_AB = 0.5*W
T_CB = W
T_CD = 1.5*W / (uCD[1]-uCD[0]*uEC[1]/uEC[0])
F_EC = -T_CD*uCD[0]/uEC[0]
from matplotlib.pyplot import *
%matplotlib inline
plot( W, T_AB, label= '$T_{AB}$', color='blue')
plot( W, T_CB, label= '$T_{CB}$', color='red')
plot( W, T_CD, label= '$T_{CD}$', color='green')
plot( W, F_EC, label= '$F_{EC}$', color='cyan')
# plot force limits:
W_max = W[-1]
plot( (0,W_max), (T_AB_lim,T_AB_lim), color ='blue', linestyle="--")
plot( (0,W_max), (T_other_lim,T_other_lim), color ='red', linestyle="--")
plot( (0,W_max), (T_other_lim,T_other_lim), color ='green', linestyle="--")
plot( (0,W_max), (F_EC_lim,F_EC_lim), color ='cyan', linestyle="--")
legend(loc='lower right')
xlabel('load $W$ (lb)')
ylabel('member force (lb)')

Looks like cable $CD$ will fail first. Solve for $W$ when $T_{CD}$ is set to equal its limit.
W_lim = T_other_lim/1.5 * (uCD[1]-uCD[0]*uEC[1]/uEC[0])
print ('largest weight W that may be lifted is',W_lim,'lb')
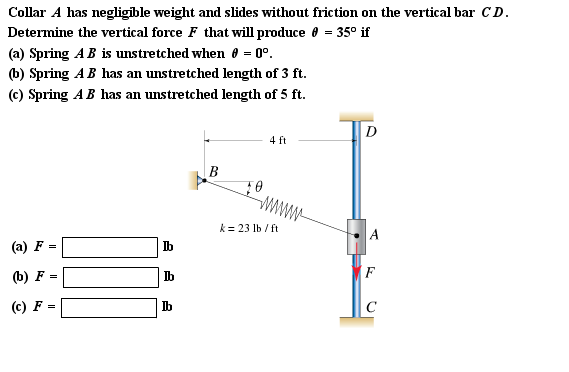
Q = 35. *dtr # theta, radians
k = 23. # lb/ft
X = 4.0 # ft
La,Lb,Lc = X, 3, 5 # unstretched length, ft, for parts a,b,c
Solution will equal the vertical component of the spring force $\vec{F}_s$.
rAB = array(( -X, X*tan(Q) ))
rAB_mag = sqrt(sum(rAB**2))
uAB = rAB / rAB_mag
# part a
L0 = La # unstretched length, ft
Fs = k*(rAB_mag - L0) * uAB # force (vector) of spring on A
print ('for unstretched length=',L0,'ft, vertical component of Fs=',Fs[1],'lb')
# part b
L0 = Lb # unstretched length, ft
Fs = k*(rAB_mag - L0) * uAB # force (vector) of spring on A
print ('for unstretched length=',L0,'ft, vertical component of Fs=',Fs[1],'lb')
# part c
L0 = Lc # unstretched length, ft
Fs = k*(rAB_mag - L0) * uAB # force (vector) of spring on A
print ('for unstretched length=',L0,'ft, vertical component of Fs=',Fs[1],'lb')
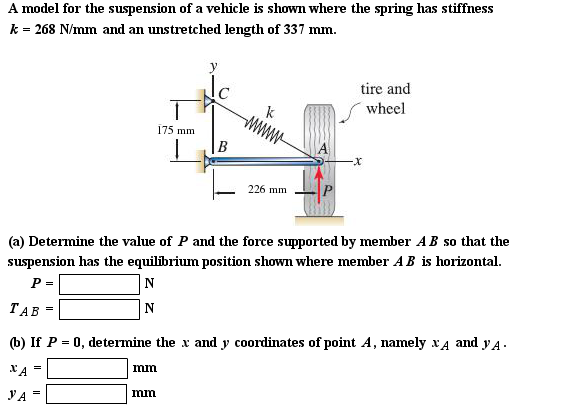
k = 229. # N/mm
L0 = 343. # mm
X = 209. # mm
Y = 169. # mm
(a)
rCA = array((X,-Y))
rCA_mag = sqrt(sum(rCA**2))
print( 'compare hypontenuse',rCA_mag,'to unstretched length',L0)
uCA = rCA / rCA_mag
FCA = k*(L0-rCA_mag)*uCA # spring force (vector), N
P = -FCA[1]
TAB = -FCA[0]
print ('solution:')
print (' vertical component of force P=',P,'N')
print (' force in AB (magnitude)=',abs(TAB),'N')
(b) Assume the origin is at point $B$.
Find the angle $\theta$ between member $AB$ and the vertical with the law of cosines:
$$L_0^2 = X^2 + Y^2 - 2XY \cos \theta$$$$\theta = \cos^{-1} \frac{X^2 + Y^2 - L_0^2}{2XY} $$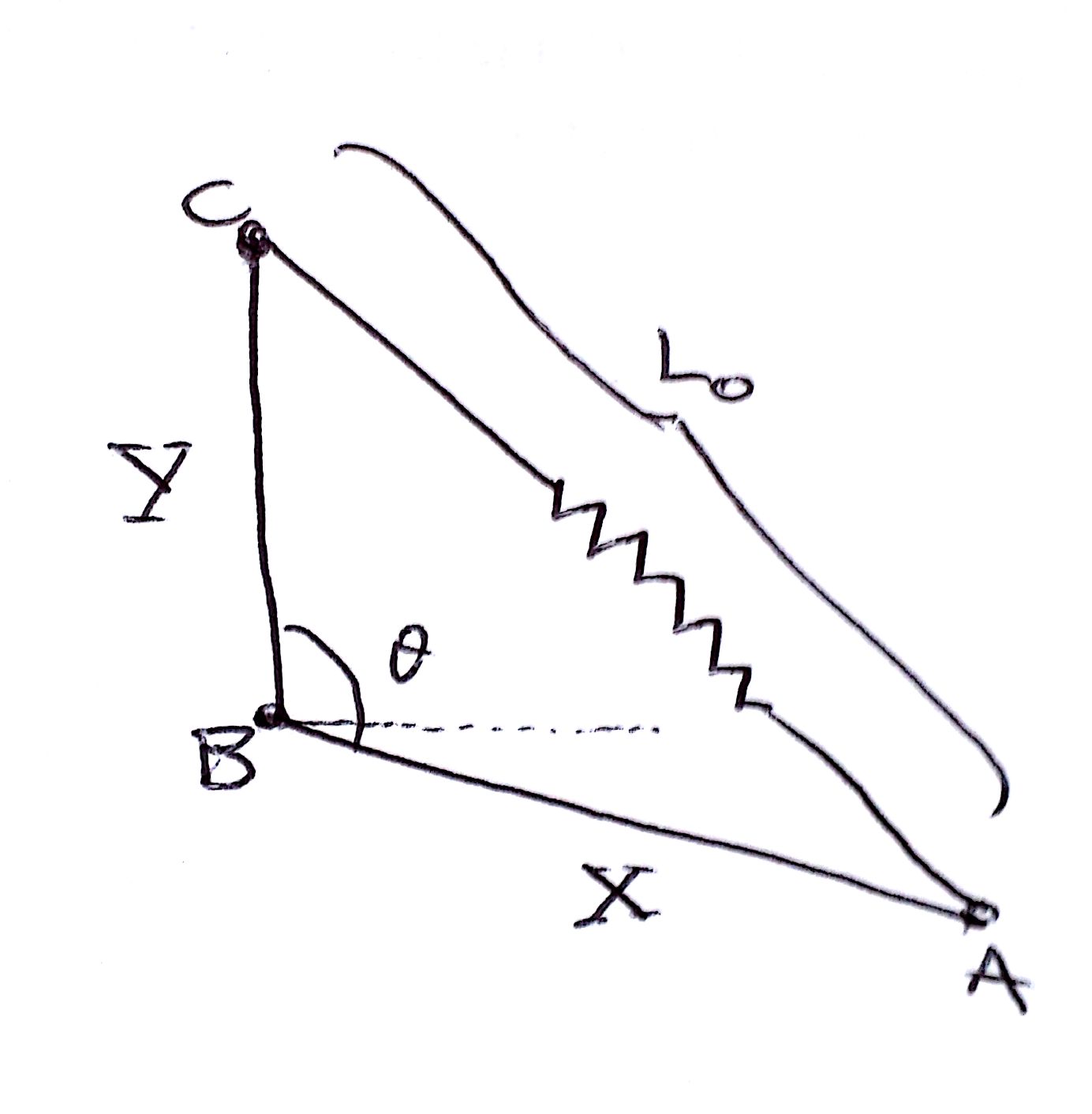
Q = arccos( (X**2+Y**2-L0**2)/(2*X*Y) )
xA = X*sin(Q)
yA = X*cos(Q)
print ('xA,yA=',xA,'mm,',yA,'mm')
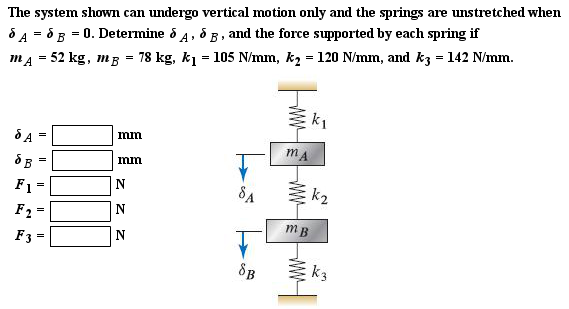
mA,mB = 49., 84. # kg
k1,k2,k3 = 104.,122.,145. # N/mm
g = 9.81 # N/kg
Define upward to be the $+y$ direction. The free body diagrams of each mass are shown below. For diagram purposes, the spring forces are assumed to all be in extension; actual spring force directions may be opposite the vector directions shown.
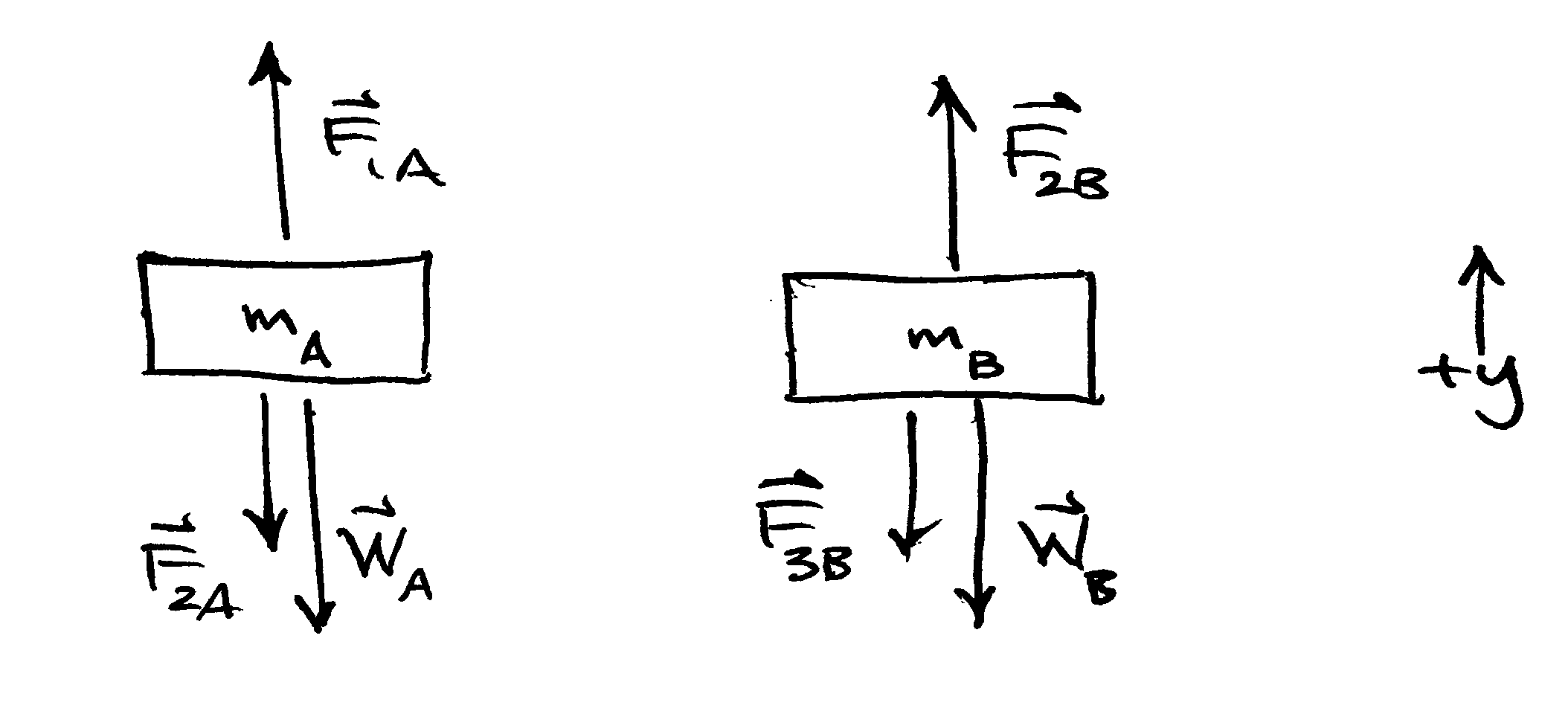
The values of $\delta_A$ and $\delta_B$ are considered positive when the displacement is as shown in the figure in the problem definition. Weight vectors are given by $\vec{W}_A=-m_A g \hat{\jmath}$ and $\vec{W}_B=-m_B g \hat{\jmath}$.
Define the force by spring 1 on mass A as $\vec{F}_{1A} = k_1 \delta_A \hat{\jmath} $. This force is in the $\hat{\jmath}$ direction when $\delta_A$ is positive (i.e., when spring 1 is extended).
Define the force by spring 2 on mass A as $\vec{F}_{2A} = k_2 (\delta_A -\delta_B ) \hat{\jmath} $. This force is in the $\hat{\jmath}$ direction when $\delta_A>\delta_B$ (i.e., when spring 2 is compressed).
Define the force by spring 2 on mass B as $\vec{F}_{2B} = -k_2 (\delta_A -\delta_B ) \hat{\jmath} $. This force is in the $-\hat{\jmath}$ direction when $\delta_A>\delta_B$ (i.e., when spring 2 is compressed).
Define the force by spring 3 on mass B as $\vec{F}_{3B} = k_3 \delta_B \hat{\jmath} $. This force is in the $\hat{\jmath}$ direction when $\delta_B$ is positive (i.e., when spring 3 is compressed).
Now force sums in the $y$ direction yeild (for mass A and B, respectively)
$$ k_1 \delta_A + k_2 (\delta_A -\delta_B ) -m_A g = 0 $$$$ - k_2 (\delta_A -\delta_B ) + k_3 \delta_B - m_B g = 0 $$This can be written in matrix form:
$$\begin{bmatrix} k_1+k_2 & -k_2\\ -k_2 & k_2+k_3 \end{bmatrix} \begin{bmatrix} \delta_A \\ \delta_B \end{bmatrix}= \begin{bmatrix} m_A g \\ m_B g \end{bmatrix} $$This is solved with a linalg routine as follows.
CC = array((( k1+k2, -k2 ),
( -k2, k2+k3 ) ))
SS = array(( mA*g, mB*g ))
solution = linalg.solve(CC,SS)
deltaA, deltaB = solution[0], solution[1]
Now the forces can be calculated as defined above.
print ('spring extensions (positive down):')
print (' delta A=',deltaA,'mm')
print (' delta B=',deltaB,'mm')
print ('force supported by each spring (negative in compression):')
print (' F1=',k1*deltaA,'N')
print (' F2=',k2*(deltaB-deltaA),'N')
print (' F3=',-k3*deltaB,'N')
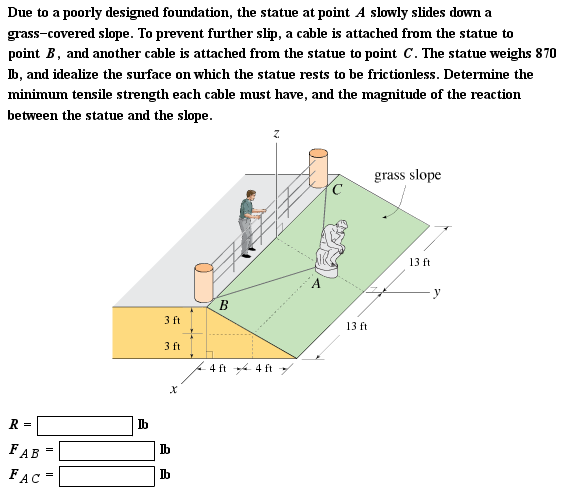
x,y,z = 12.,6.,5. # ft
W = 800. # lb
Force sum:
$$-W \hat{k} + F_{AB} \hat{u}_{AB} + F_{AC} \hat{u}_{AC} + R \hat{u}_\perp = 0$$Symmetry requires that $ F_{AB}= F_{AC}=T$. So we have 3 equations and 2 unknowns ($T$ and $R$):
$$-W \hat{k} + T \left (\hat{u}_{AB} + \hat{u}_{AC} \right ) + R \hat{u}_\perp = 0$$rAB = array(( x, -y, z))
rAC = array((-x, -y, z))
uAB = rAB/sqrt(sum(rAB**2))
uAC = rAC/sqrt(sum(rAC**2))
rperp = cross(uAC,uAB)
uperp = rperp/sqrt(sum(rperp**2))
uz = array((0.,0,1))
import sympy as s
# define symbolic variables:
Ts,Rs = s.symbols('Ts,Rs')
# construct the equation that equals zero:
eq = -W*uz + Ts*(uAB+uAC) + Rs*uperp
print (eq[0])
print (eq[1])
print (eq[2])
There is nothing going on the $x$ direction, so solve the other two equations.
ss = s.solve( [eq[1],eq[2]], [Ts,Rs])
T = float(ss[Ts])
R = float(ss[Rs])
print ('R=',R,'lb')
print ('F_AB=F_AC=',T,'lb')
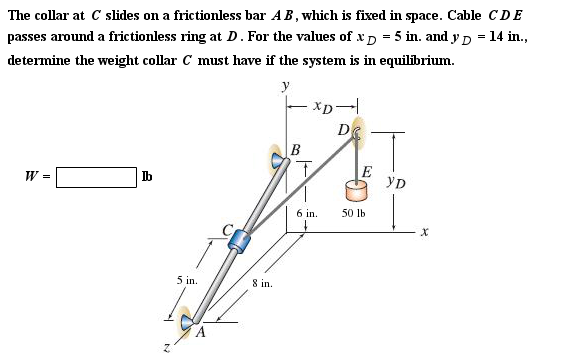
WE = 50.0 # lb
xD,yD = 5, 14 # in
rOA = array(( 0., 0., 8. )) # in
rOB = array(( 0., 6., 0. )) # in
rOD = array(( xD, yD, 0. )) # in
lAC = 5 # in
rAB = rOB - rOA
uAB = rAB / sqrt(sum(rAB**2))
rAC = uAB * lAC
rCD = rOD - (rOA + rAC)
uCD = rCD / sqrt(sum(rCD**2))
T = WE * uCD # force vector (in lb) on C from cable CDE
Rx,Rz = -T[0], -T[2] # two components of the reaction force from bar
Ry = -(Rx*uAB[0] + Rz*uAB[2])/uAB[1] # setting dot product R.uAB to zero yeilds Ry
W = Ry + T[1]
print ('weight W=',W,'lb')